Robotics Algorithm Development Intern, Jul. 2018 - Aug. 2018
Table of Contents
Overview
- Implemented sensor fusion between a 40-channel LiDAR, i.e., Pandar40 and gyroscope and achieved a 5% accuracy improvements on top of state-of-the-art SLAM framework and drew a 3D point cloud map of Tongji University Jiading Campus below 10m
- Deployed control, decision, and communication algorithms for a self-developed skid steer wheel robot, realizing autonomous navigation and obstacle avoidance in a $ 300 m^2 $ workspace
Demos
Examples of final mapping results can be seen as follows:
Pointcloud Demo of Tongji Jiading Campus 👉 Corresponding satellite map from Google map Up: Main Gate, Down: Kaiwu Building
Misc.
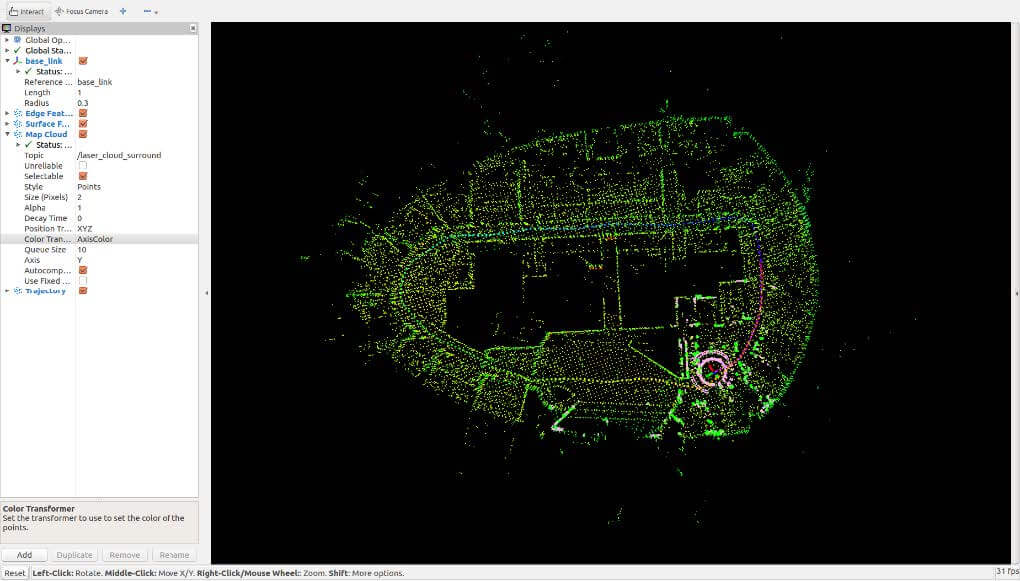
Indoor SLAM @ Hesai Tech
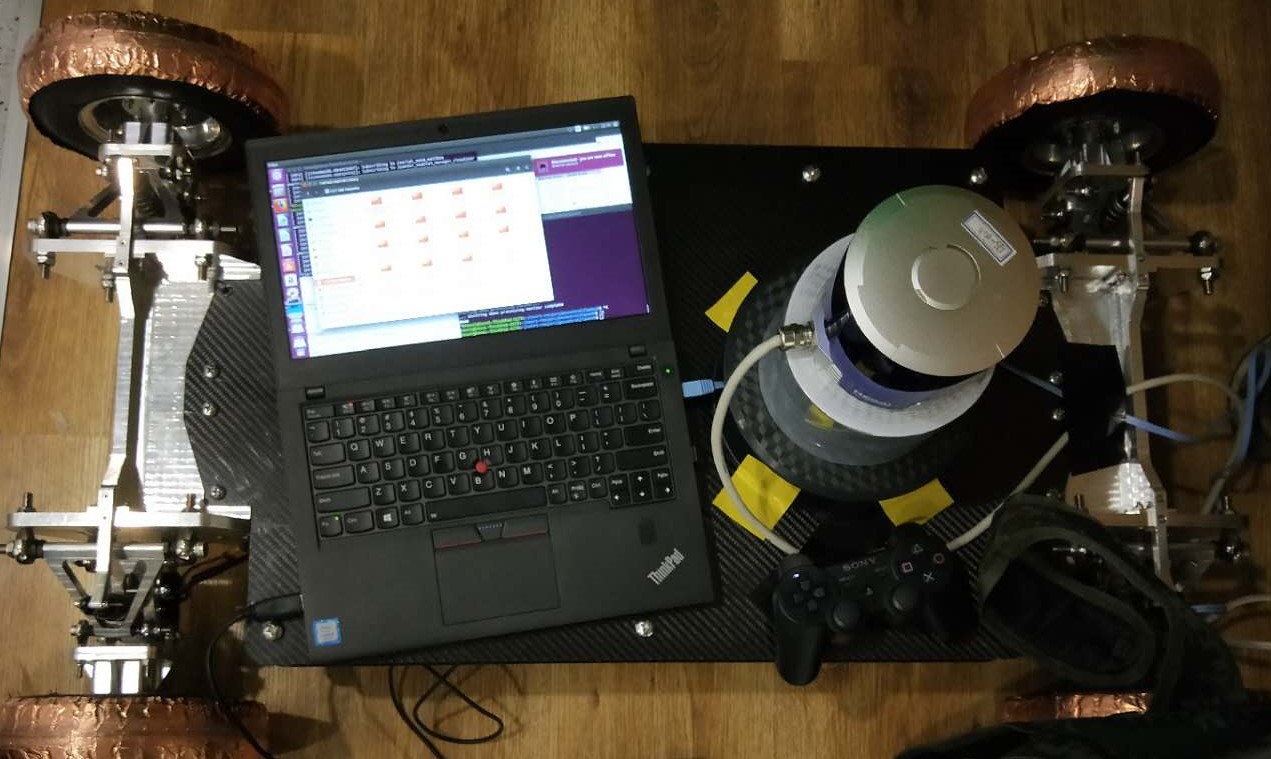
Skid Steer Wheel Robot equipped with Pandar40 LiDAR