2022
Jun 30, 2022: My work at LASA as second author accepted by IROS’22.
From last October, I have worked as Research Assistant at
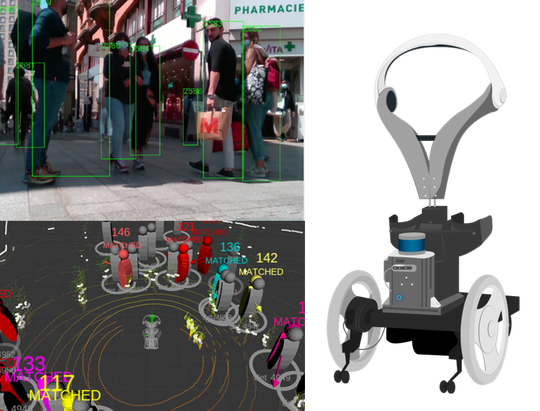
Learning Algorithms and Systems Laboratory (LASA), EPFL to help create a benchmark of mobile robot navigation around pedestrians from experimental data of a personal mobility device (
Qolo robot) navigating autonomously around pedestrians.
As a result, the developed dataset and
toolkit has been summarized as a paper named ‘
Pedestrian-Robot Interaction on Crowd Navigation: Reactive Control Methods and Evaluation’, which is accepted by
IROS’2022, Kyoto!
Apr 1, 2022: I am honored to be selected as summer research assistant at CCVL group @ JHU !
Feb 21, 2022: I start work as a semester research student at Image Communication and Understanding Group, Computer Vision Lab (CVL), ETH Zürich !
Jan 14, 2022: I will work as a Student Research Assistant (HiWi) in Robotics at RobotX Center, ETHZ in 2022 Spring Semester !
Starting in March 2022, I will join
ETHZ RobotX Center as Student Research Assistant. I will work part time to support the development of robotic platforms (e.g.,
SuperMegaBot) and assist with the preparations and execution of the
Robotics Summer School taking place from July 3 to July 8.
2021
Oct 11, 2021: I start work as a research assistant at Learning Algorithms and Systems Laboratory (LASA), EPFL !
Jul 9, 2021: Unforgettable week in ETH Zürich Robotics Summer School at Wangen an der Aare
From July 2 to 9, I got a valuable opportunity to participate in the 2021
ETH Zurich Robotics Summer School! During this short week, lecturers from ASL, RSL, and V4RL gave us
a wealth of tutorials on state estimation, trajectory optimization, mapping, path planning, and artefact detection & tracking. Together with other participants from ETHz, Aalto and the University of Bologna, we finally programmed based on
SuperMegaBot and successfully completed the robot challenge on Friday at the test site!
May 30, 2021: My third virtual conference–ICRA’21.
Feb 28, 2021: Our paper MULLS accepted by ICRA’21 with strong recommendation from reviewers.
Feb 22, 2021: I start work as a semester research student at Laboratory of Intelligent Systems (LIS), EPFL !
2020
Oct 25, 2020: My second virtual conference–IROS’20.
Our paper
TACF is presented virtually at
IROS’20 from Oct 25 to Nov 25 this year. We are looking forward to having some fruitful discussions. For more info, please check our
~10min presentation video and
paper.
Oct 13, 2020: I’ll be a graduate research assistant at VITA !
Sep 25, 2020: First birthday in Lausanne 🥳
I have arrived in Lausanne on Sep 9 and just started my first MSc semester @ EPFL. This year, the world, family, and I undergo earth-shaking changes; I am determined to keep moving and find something/one I love!

Sep 07, 2020: Our paper TB-BiCF accepted by IEEE Transactions on Circuits and Systems for Video Technology.
Jul 01, 2020: Our paper TACF accepted by IROS’20.
Jun 15, 2020: Awarded as Excellent Graduate of Shanghai.
Together with 11 other students from the School of Mechanical Engineering, it is my honor to be granted this highest honor for all undergraduates of all majors from more than ten universities in Shanghai this year.
May 31, 2020: My first virtual conference–ICRA’20.
Our
paper BiCF is presented virtually at ICRA this year. We are open to discussions, and looking forward to having some fruitful discussions on our slack channel
#moc08_3. You can also check our
~10min presentation video (if you want to peek at the qualitative results video
click here).
Mar 30, 2020: Admission to MSc in Robotics @ EPFL.
In late March, I got the news about my admission to
EPFL Master Program in
Robotics. I will start my master study this coming fall and can’t wait to learn from talented professors and peers from all over the world !
Jan 21, 2020: Our paper BiCF accepted by ICRA’20.
Jan 07, 2020: Our paper MKCT accepted by Neural Computing and Applications.
2019
Nov 04, 2019: Our paper SPCF won the Best Poster Award in the IROS Workshop.
 Yujie He is currently a Master student in Robotics at École polytechnique fédérale de Lausanne (EPFL), Switzerland. Before that, I received my Bachelor’s Degree in Mechanical Engineering (Mechatronics Track) with Excellent Graduate Honor in 2020 from Tongji University, Shanghai, China.
Yujie He is currently a Master student in Robotics at École polytechnique fédérale de Lausanne (EPFL), Switzerland. Before that, I received my Bachelor’s Degree in Mechanical Engineering (Mechatronics Track) with Excellent Graduate Honor in 2020 from Tongji University, Shanghai, China.