Final project in MICRO-502 Aerial robotics
Members: Yujie He, Jianhao Zheng, and Longlai Qiu
Lecturer: Prof. Dario Floreano
Table of Contents
Goal: Autonomous Navigation and Landing for Crazyflie
In this practical, we programed based on Crazyflie 2.1 to find and precisely land on a platform with height of 10 cm by utilizing z reading from flow deck. Additionally, We also utilized sensor readings from multi-ranger deck to avoid the obstacles presented in the environment.

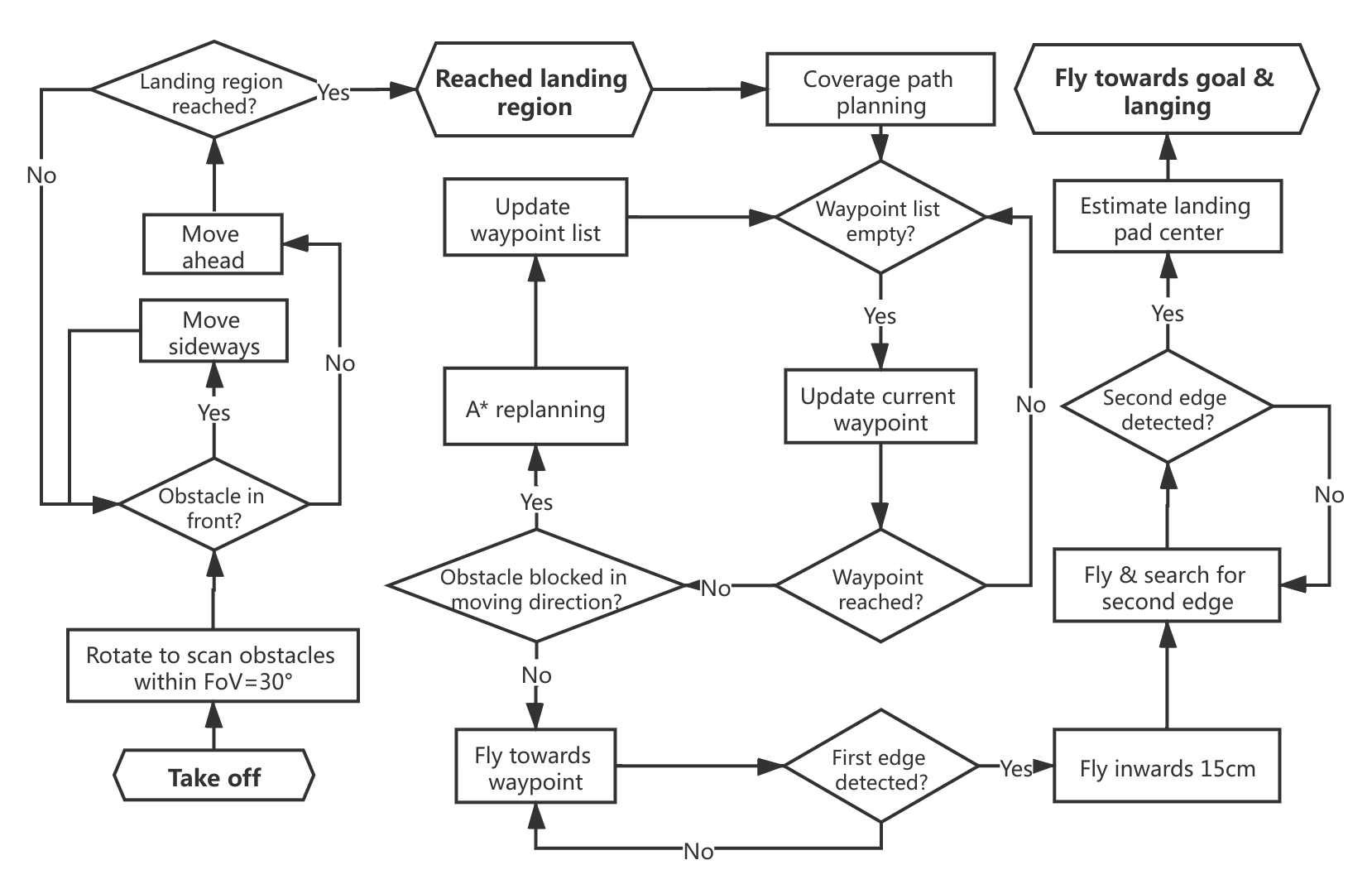
Pipeline
| Autonomous navigation & landing | Workflow |
|---|---|
| ✓ Local obstacle avoidance ✓ Grid-based coverage path planning ✓ Waypoint following ✓ A* search-based re-planning |
 |
Code
Features
Modular library for different tasks
├── cf_load_params.py # parameter setting ├── cf_search.py # searching functions such as, coverage planning, box edge detection, A* search ├── cf_state_class.py # state estimation class for the proposed task └── cf_utilis.py # utility functions, such as live plottingUtilized
argparsefor quick parameter adjustment and tuningUtilized
matplotlibfor real-time visualization
Structure
Code folder:
./code/crazyflie-lib-python/group_7/
.
├── cf_load_params.py
├── cf_search.py
├── cf_state_class.py
├── cf_utilis.py
├── overall.py
├── draw_traj_demo.py
├── logs
│ ├── overall-20210530_1930_x.csv
│ ├── overall-20210530_1930_x_half.csv
│ ├── overall-20210530_1930_y.csv
│ └── overall-20210530_1930_y_half.cs
└── readme.md
Demo
overall.py: overall pipeline from taking off to landing.# -x (float) for setting initial x position # -y (float) for setting initial y position # -v (bool) for enabling visualization python overall.py -x 0.6 -y 0.6 -v

draw_traj.py: x-y trajectory visualization with region annotation# --log_folder (str) for assigning input log folder # --logname (str) for loding log file # --img_folder (str) for assigning output image folder # -n/--name (str) for assigning output image name # --zone_anno (bool) for enabling region annotation python draw_traj_demo.py --logname overall-20210530_1930 -n cf_demo --zone_anno

The estimated values drift considerably after long flights. Moreover, the predicted starting position is significantly different from the starting point after the drone re-takes off.
Experiments
| Features | Figures |
|---|---|
| ✓ Size: 480 cm (W) × 120 cm (H) ✓ Starting & Landing pad - starting (x, y) = (60 cm, 60 cm) - landing pad randomly placed ✓ Circular and rectangular obstacles | 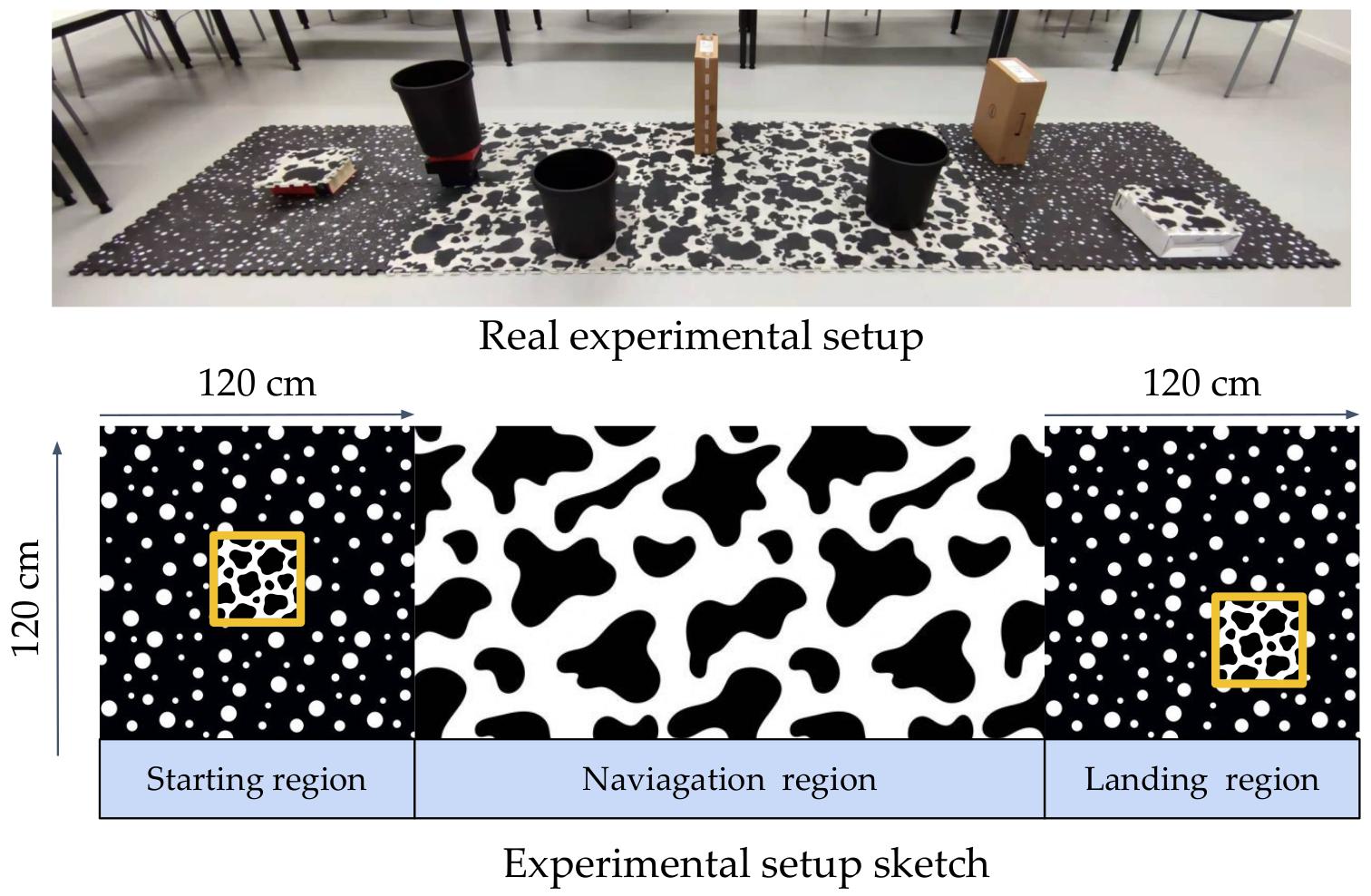 |