Research Assistant at Learning Algorithms and Systems Laboratory (LASA), EPFL since Oct. 2021 Supervisor: Dr. Diego Felipe Paez Granados, and Prof. Aude Billard
Table of Contents
Demo
Background
In this work, we will create a dataset of mobile robot navigation around pedestrians from experimental data of a personal mobility device navigating autonomously around pedestrians in the streets of center Lausanne.
The focus will be to assess people navigation behavior around the robot by extracting trajectories and motions. I aim to build a detecting, tracking, and motion profile extraction pipeline on lidar and camera data.
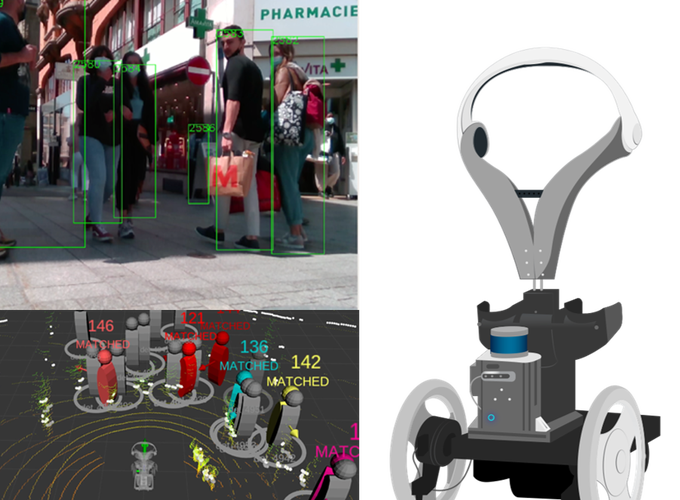
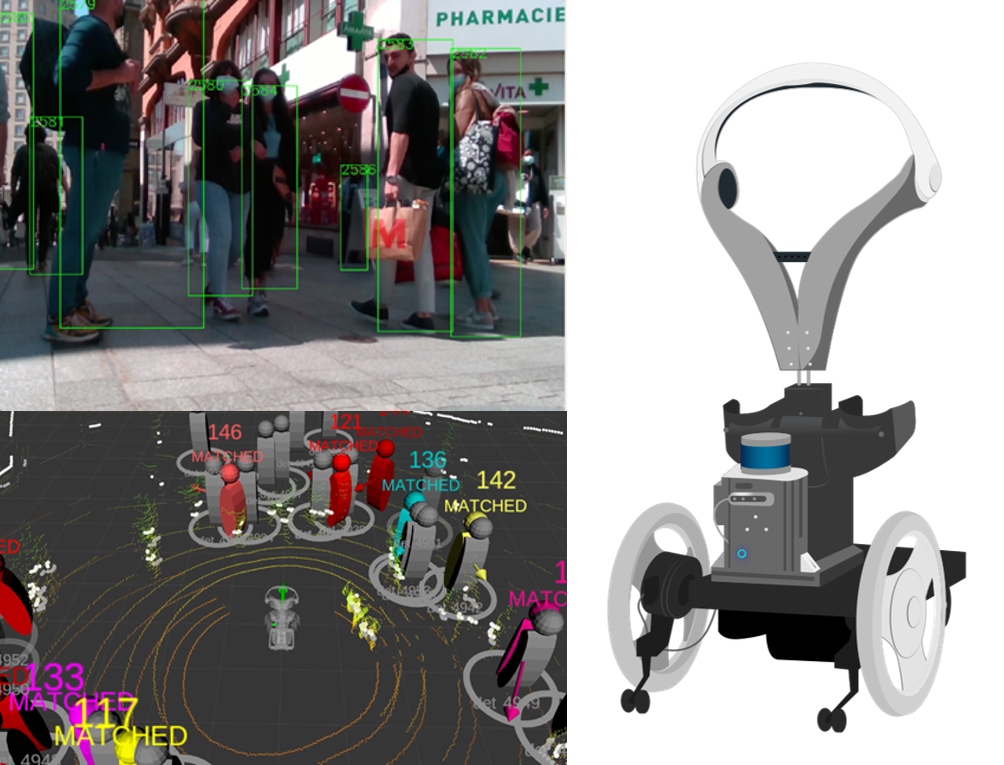 Overview of detected pedestrian from recorded rosbag and qolo robot
Overview of detected pedestrian from recorded rosbag and qolo robot
Single sequence evaluation
| Metrics | Example |
|---|---|
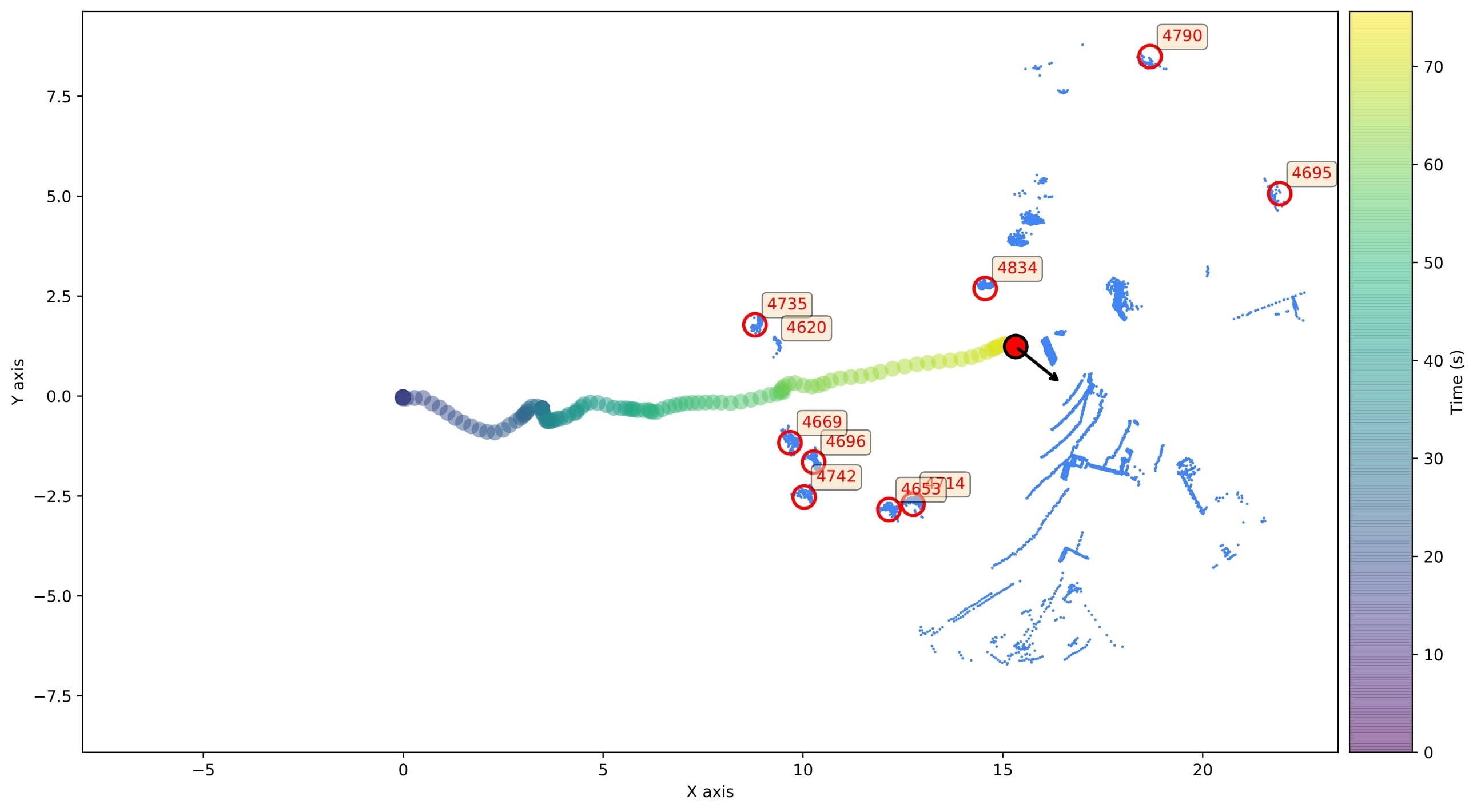
| Crowd characteristics | 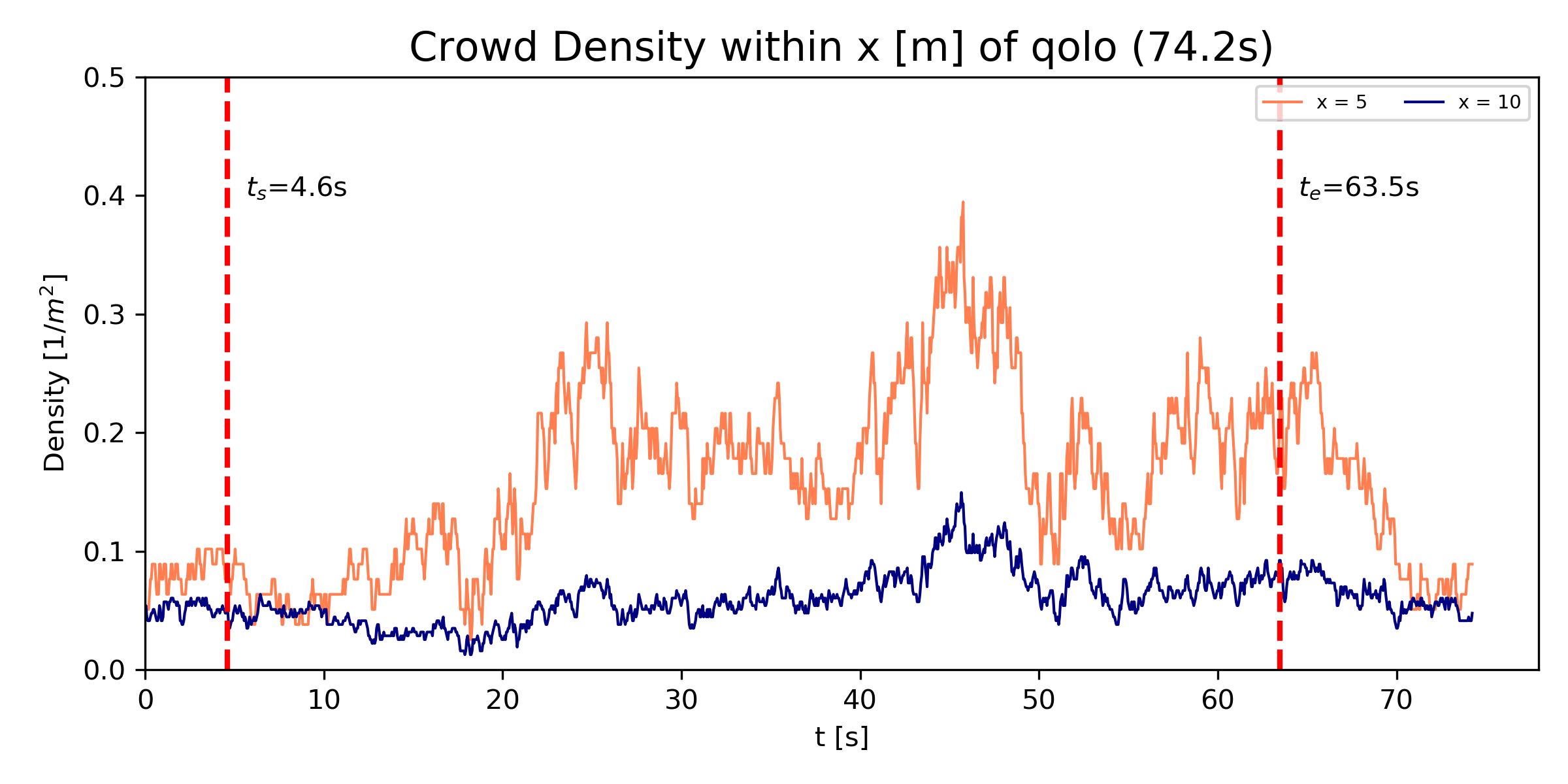 |
| Path efficiency | 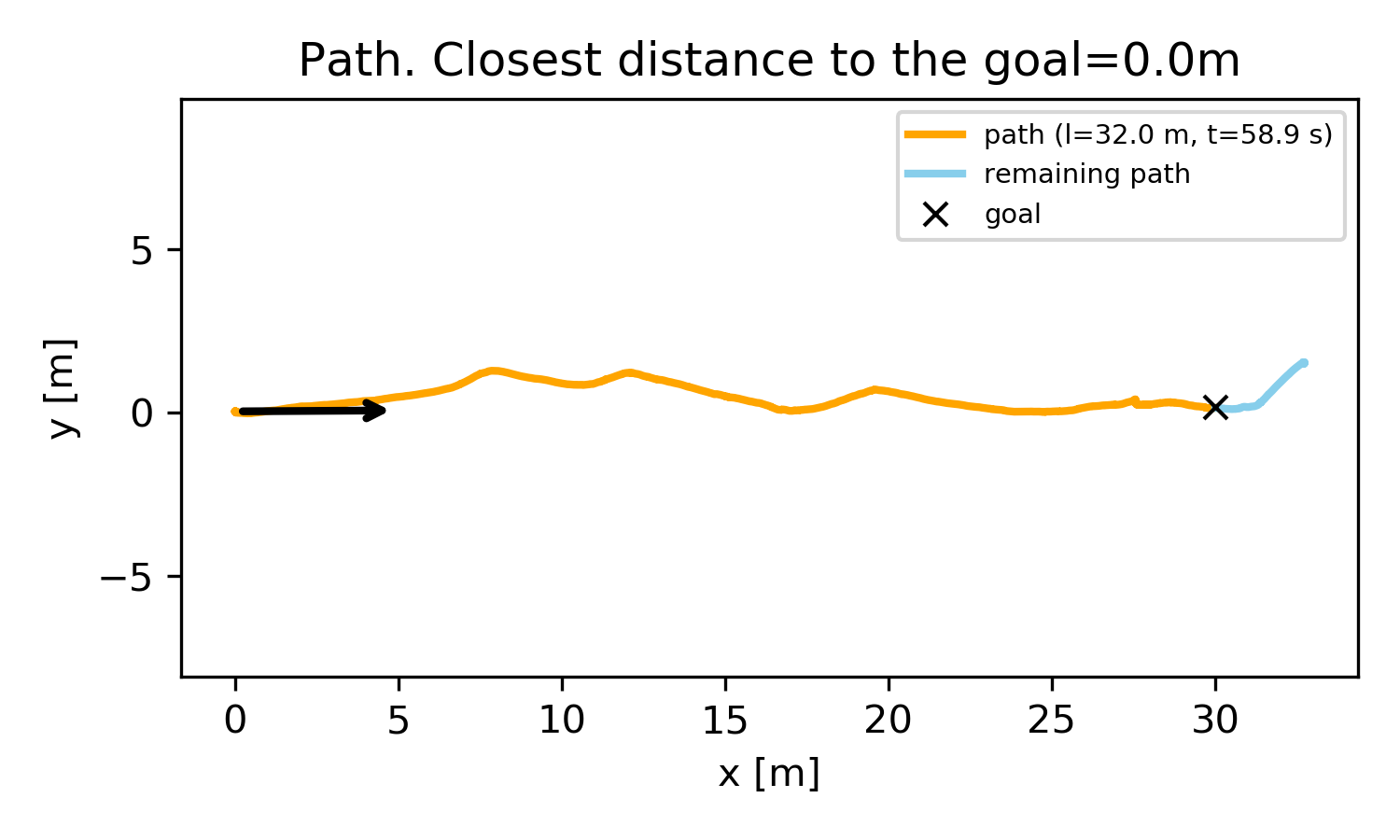 |
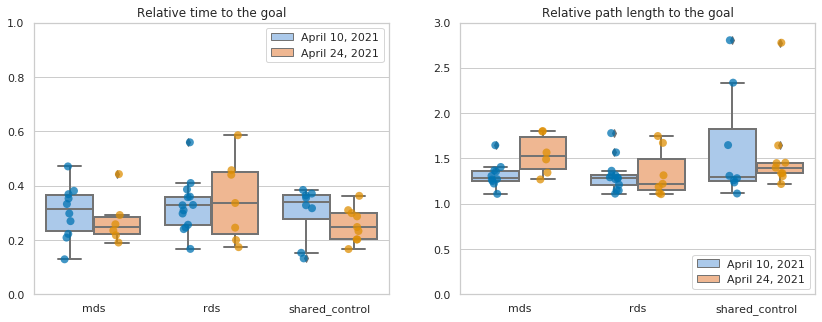
| Shared control performance | 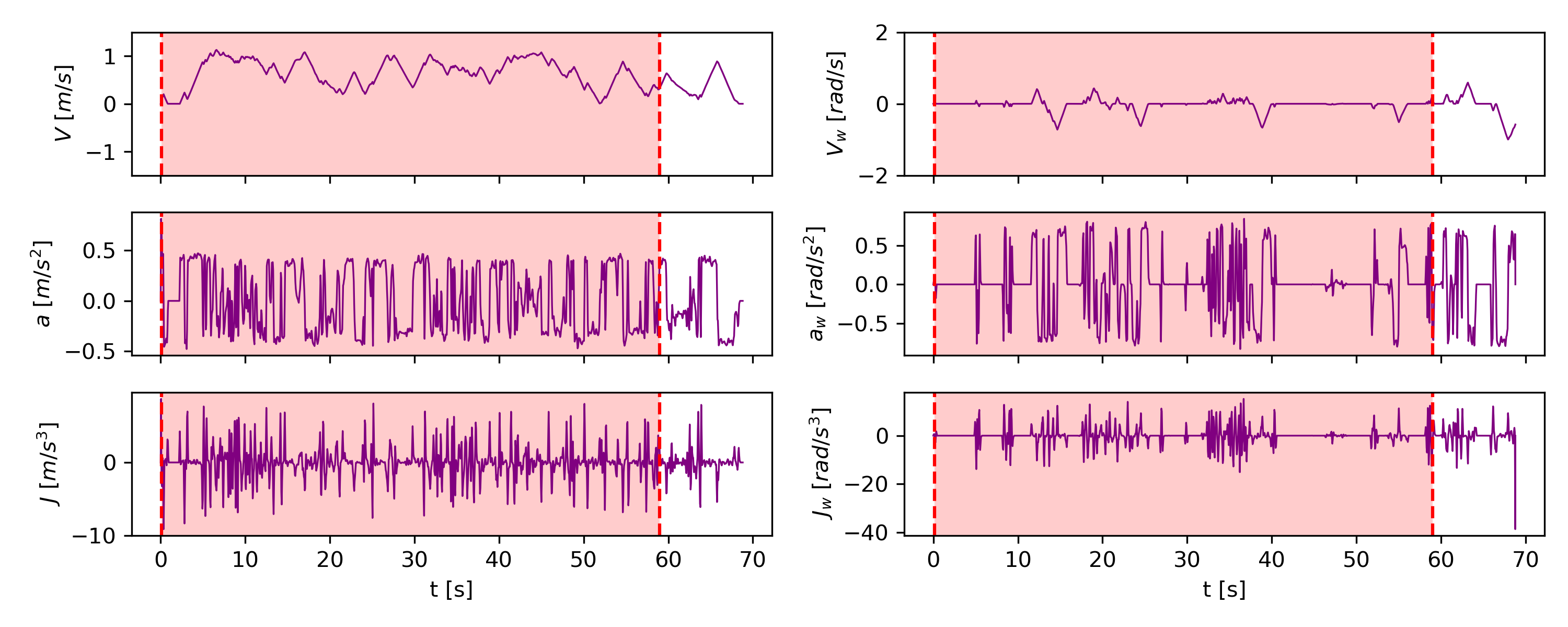 |
Interclass evaluation
Dataset and toolkit overview
Code available in epfl-lasa/crowdbot-evaluation-tools!