MICRO-453 Robotics practicals, EPFL, 2021 Spring
Students: Chuanfang Ning, Jianhao Zheng, and Yujie He
Table of Contents
🔑 Keywords
Thymio, PID, Way following, Obstacle avoidance, Pledge algorithm, ArUco marker, Sim2Real, Gazebo

📷 Example videos
For more examples, please refer to https://go.epfl.ch/ros_basics_final_2021.
| Simulation in Gazebo | Real-world test on campus |
|---|---|
🔨 How to launch the example code?
For more details, please refer to hibetterheyj/EPFL_ROS_Practicals_Project.
- simulate Thymio robot in Gazebo with an interactive window
roslaunch ros_basics_control simu_thymio.launch
- adding waypoints and obstacle for the robot
roslaunch ros_basics_control simu_thymio.launch
roslaunch ros_basics_exercise set_simu_waypoints_obstacle.launch
- extract pose and sensor information from rosbag files
roslaunch ros_basics_exercise view_with_rosbag.launch
# open a new terminal
rosrun ros_basics_exercise topic_reader.py
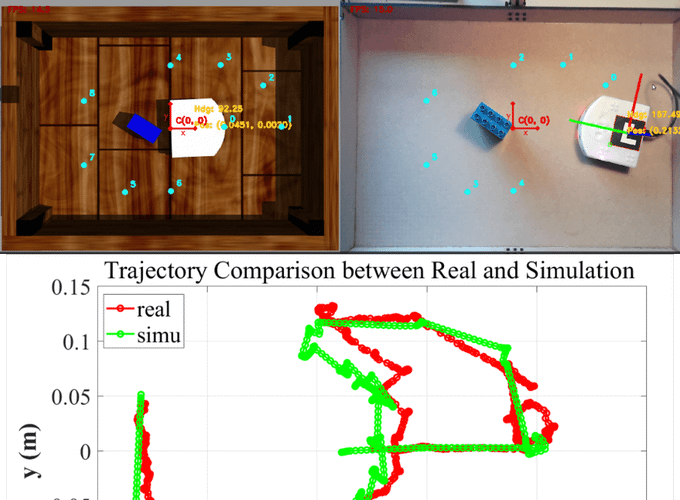
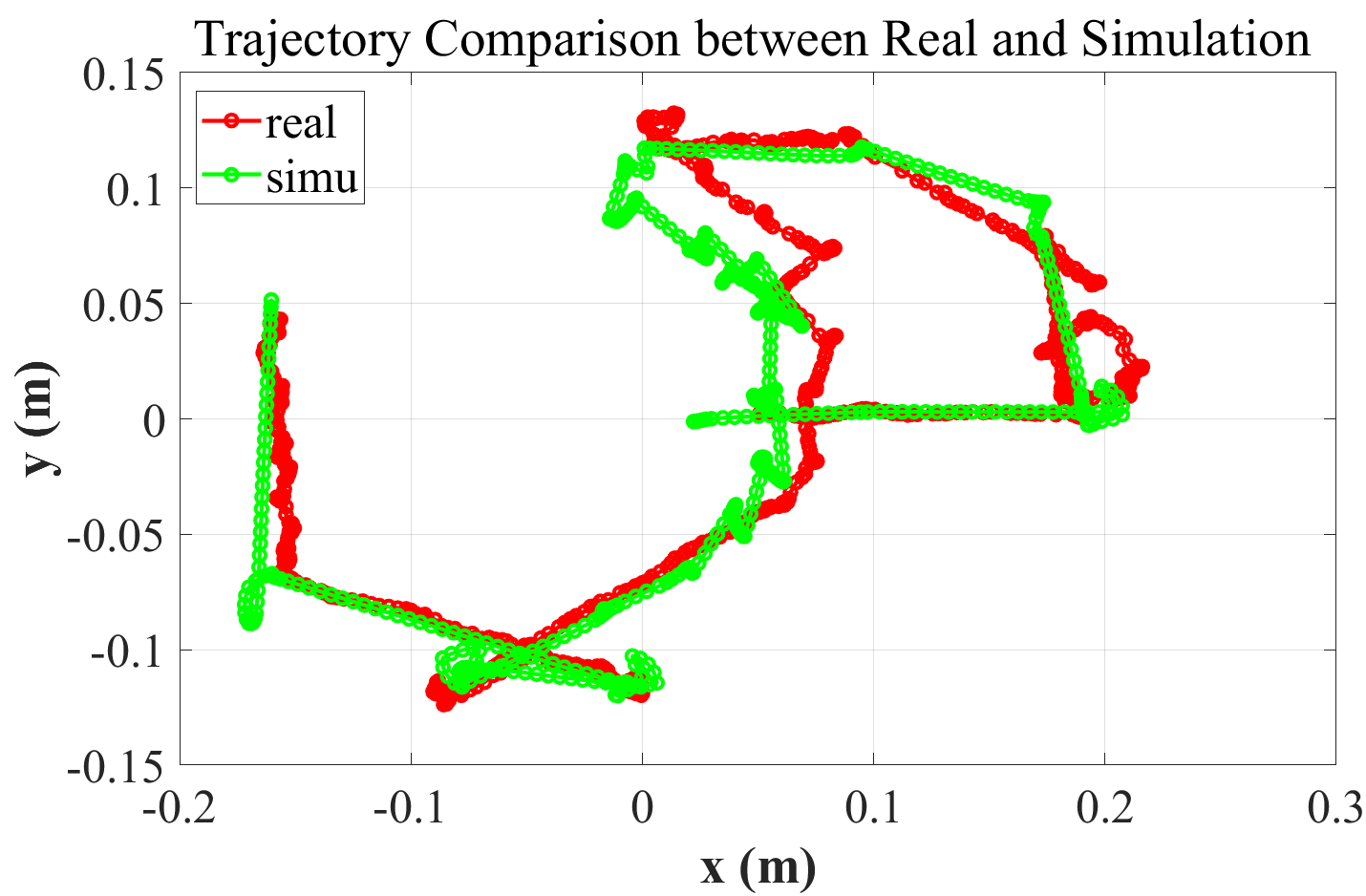
- plot trajectory comparison between real and simulation (using matlab)
cd results_from_bag/
# run `plot_traj_comp.m` in MATLAB
⭐️ Acknowledgement
Thanks to Vaios Papaspyros and Rafael Barmak from MOBOTS at EPFL for the amazing course tutorials !