Sample Purification-Aware Correlation Filters for UAV Tracking with Cooperative Deep Features
Abstract
Correlation Filters (CF) have recently demonstrated promising performance in terms of rapidly tracking objects for unmanned aerial vehicles (UAV) in different types of UAV tracking tasks. The strength of the approach comes from its ability to learn how the object is changing over time efficiently. However, due to heavy dependence on the quality of the training set and the lack of real negative training samples, the object appearance model may be easily interfered by the corrupted training samples, which can result in suboptimal performance. Besides, limited by the representation of a single feature, the tracking model may fail to cope with the complex surrounding environment and considerable appearance variation of the object. In this work, the principal causes behind the problems of the abundance of object representation and purity of training samples have been tackled, to simultaneously improve both discriminative power and anti-disturbance capability of the tracking model. Comprehensive experiments on 100 challenging UAV image sequences have demonstrated that the novel sample purifying tracker based on cooperative features learning, i.e., SPCF tracker, outperforms 15 state-of-the-art trackers in terms of efficiency, robustness, and accuracy. To the best of our knowledge, the presented SPCF tracker is designed for object tracking and employed in UAV tracking tasks for the first time.
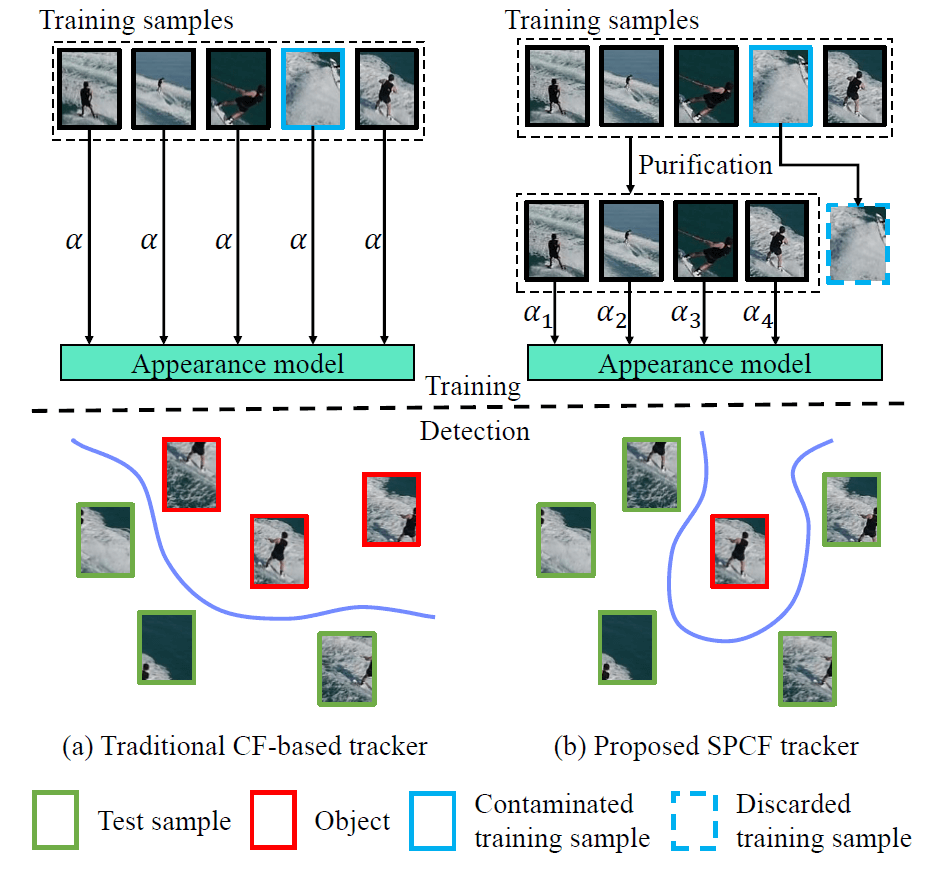 Comparison between traditional CF-based and proposed SPCF tracker
Comparison between traditional CF-based and proposed SPCF tracker